Een robot van 30 centimeter is misschien wel de beste springer op aarde. Hij kan ruim 32 meter hoog springen – meer dan honderd keer zijn eigen lengte. Deze superspringer verslaat elk springend dier en komt drie keer hoger dan de beste mechanische springers.
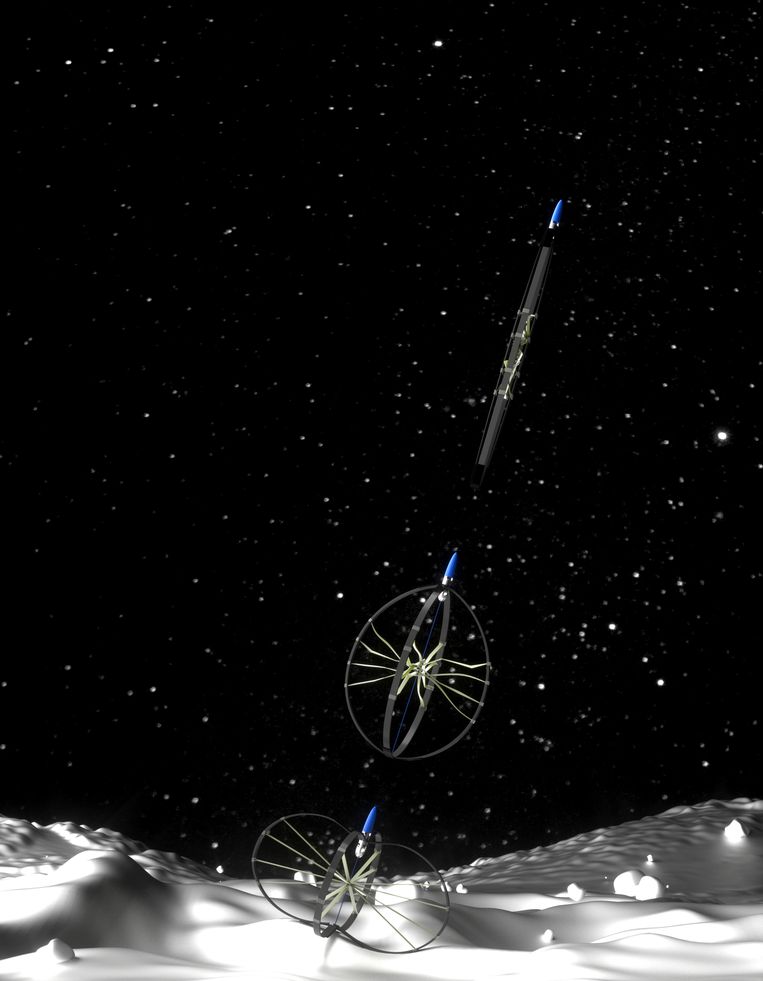
Erg indrukwekkend ziet het springende robotje er niet uit. Het weegt dertig gram en bestaat uit strips van koolstofvezel, wat elastiekjes en een blauwe, raketvormige punt. Maar laat dit uiterlijk je niet bedriegen. De robot springt niet alleen ontzettend hoog, hij komt, dankzij de robuuste koolstofvezel ook ongeschonden neer. En hij is behoorlijk zelfstandig. In een filmpje is te zien hoe het robotje op een klif springt, opkrabbelt, recht gaat staan en nogmaals springt.

Hoe vetter het eten, hoe lekkerder het ruikt en hoe liever we het eten
Als we een snackbar of oliebollenkraam naderen, komt direct onze neus in actie: bijna onweerstaanbaar, zo lekker. Wat wij in ...
Het ontwerp van de meeste springrobots is afgekeken bij springende dieren of insecten. Maar volgens de ontwerpers van de superspringer hebben deze biologische mechanismen een aantal beperkingen. Zo zit er een grens aan de lengte van spieren en de hoeveelheid energie die ze leveren doordat ze maar één keer kunnen samentrekken voor een sprong. Die beperkingen kunnen overwonnen met mechanisch ontworpen systemen, schrijven de ontwerpers in het vakblad Nature.
Krachtinspanning
De springrobot waarmee ze dit demonstreren is in wezen een grote veer die bestaat uit vier flexibele strips van koolstofvezel die met elastiekjes zijn verbonden met een draad in het midden. Die draad zit onderaan vast en verdwijnt bovenin in een motortje in de raketvormige punt. Het motortje is een lier die de draad oprolt waardoor de koolstofvezelstrips onder spanning naar buiten buigen en de elastiekjes worden uitgerekt. Dankzij de lier en de relatief lange draad kan er met een beperkte krachtinspanning meer energie worden opgeslagen dan haalbaar is voor een dier of insect. Die energie komt vrij zodra de lier loslaat. Dan rolt de draad af, klappen de koolstofvezelstrips naar binnen en schiet de robot als een speer omhoog.
De materialen spelen ook een rol. ‘Door de combinatie van koolstofvezel en elastiek kunnen we meer energie opslaan in de veer-robot dan mogelijk is in een spier of ander natuurlijk materiaal,’ mailt ontwerper Elliot Hawkes van de Universiteit van Californië. ‘Dat resulteert in meer springhoogte.’
De ontwerpers haalden wel wat inspiratie uit de natuur. Hawkes: ‘Voor het het vasthouden en vrijgeven van de energie in de veer, keken we hoe een vlo dat doet.’ Vlooien slaan de energie voor hun sprong ook op in een elastisch materiaal in hun lichaam en lanceren zich met een veerprincipe.
Energieslurpende drones
Springende robots hebben een aantal toepassingen. Een springrobot zou zo gebieden kunnen verkennen die nu alleen bereikbaar zijn met energieslurpende drones. Denk aan onregelmatig terrein met rotsen, kliffen of bergen puin na een aardbeving.
Een andere toepassing waar Hawkes op hoopt is ruimteonderzoek. De atmosfeer van de maan is te dun voor vliegende robots. Maar het is, vanwege de zwakkere zwaartekracht, ideaal voor de springrobot. Die zou daar 125 meter hoog komen en in een enkele sprong een halve kilometer kunnen afleggen.
Voordat de springrobot ingezet kan worden, moeten de ontwerpers ervoor zorgen dat de robot de hoogte en de richting van zijn sprongen beter kan controleren, schrijft Sarah Bergbreiter van de Amerikaanse Carnegie Mellon University in een commentaar in Nature. De robot kent nu maar één springhoogte en is nauwelijks te sturen. ‘En hoewel de robot zichzelf klaar kan maken voor een volgende sprong, duurt dat nu nog twee minuten,’ vervolgt Bergbreiter. ‘Andere springrobots kunnen wel onmiddellijk opnieuw springen.’
Hawkes laat weten dat hij inderdaad bezig is met het verbeteren van het robotontwerp. ‘We werken samen met de Amerikaanse ruimtevaartorganisatie NASA om een volledig functionele robot te ontwerpen die niet alleen gecontroleerd kan rondspringen, maar die bijvoorbeeld ook monsters, zoals stukjes maansteen, kan verzamelen. We hopen dit apparaat in de komende vijf jaar naar de maan te sturen.’